


学习机器人学的基础知识,以及如何将理论应用到现实世界中
你会学到:
了解机器人技术的基础
将理论概念应用到实际任务中
确定给定机器人任务中需要解决的问题
根据所学的概念为已识别的问题开发解决方案
MP4 |视频:h264,1280×720 |音频:AAC,44.1 KHz,2 Ch
语言:英语+中英文字幕(云桥网络 机译) |时长:58节课(14小时5分钟)|大小解压后:5.79 GB
要求
需要线性代数、控制理论和三维动力学方面的基础知识
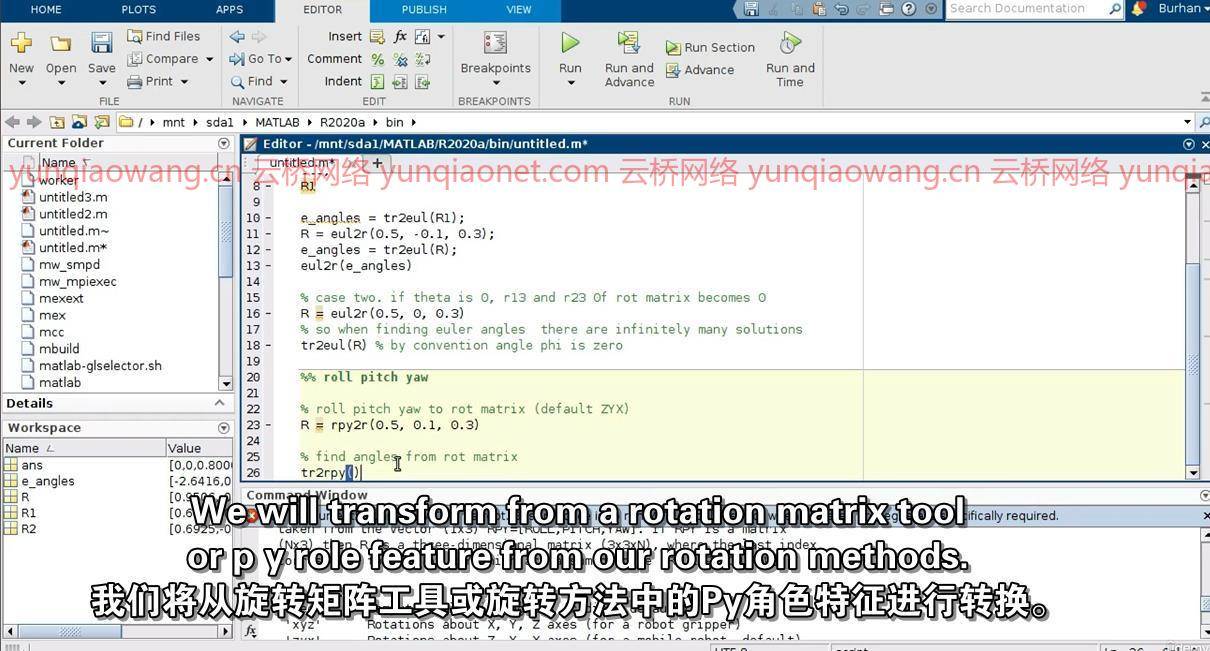
遵循编码课程所需的基本Matlab技能
描述
你对机器人充满热情,不知道从何说起?不要浪费时间问“机器人学从哪里开始?”,“读哪本机器人学的书?”。启动机器人的最好方法是以正确的顺序学习必要的基本概念,因为每个下一个概念都与前一个概念相关。本课程的目的是以正确的顺序向您介绍机器人学中最重要的基本概念,这样您就可以轻松地联系和理解每个概念背后的逻辑。
本课程旨在提供理论,而不涉及不必要的细节。机器人学中的理论和推导是不可能避免的,因为它们将帮助你理解机器人概念背后的逻辑,这样你就可以处理不同种类的现实机器人问题。然而,与书本相反,这门课程也提供编码和模拟课程,以便用实践知识补充理论知识。一起获得理论和实践技能将有助于你识别问题并应用适当的解决方案来解决它。
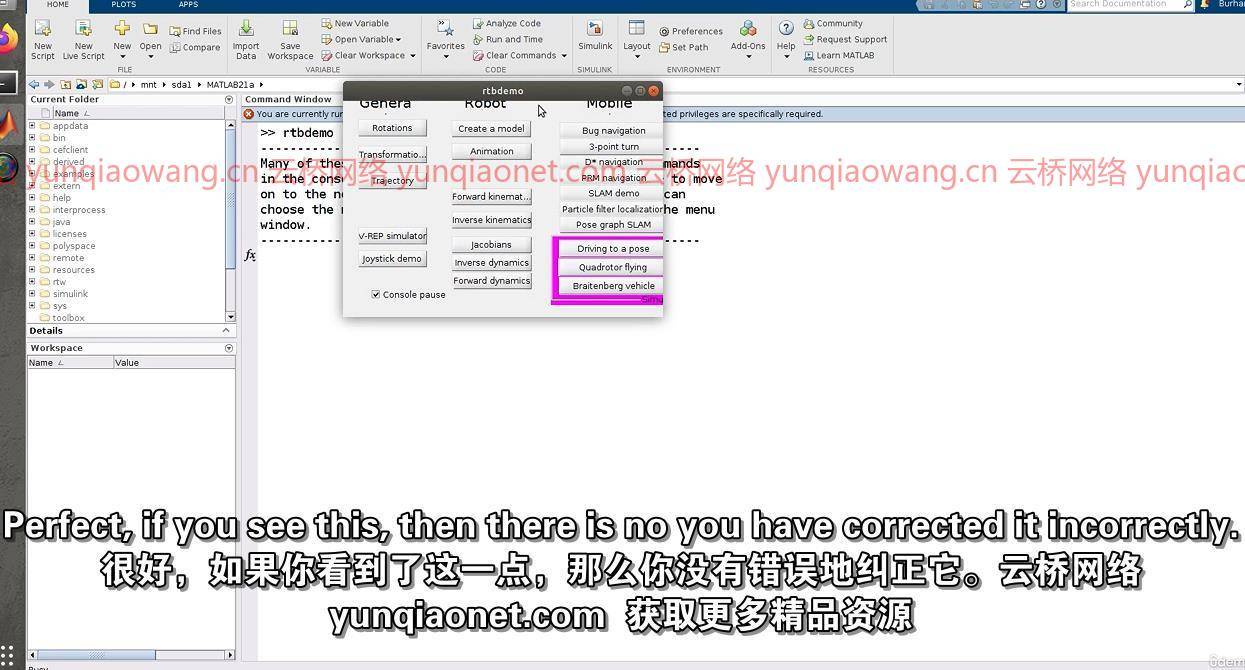
在本课程中,您将学习:
三维刚体动力学,包括旋转、旋转和齐次变换矩阵的不同表示
使用DH惯例的正向运动学
速度运动学,几何和解析雅可比,机器人操作器奇点和逆运动学
基于欧拉-拉格朗日方法的机器人机械手动力学建模
机器人操作器的轨迹生成(多项式和梯形轨迹)以及轨迹的运动学和动力学缩放
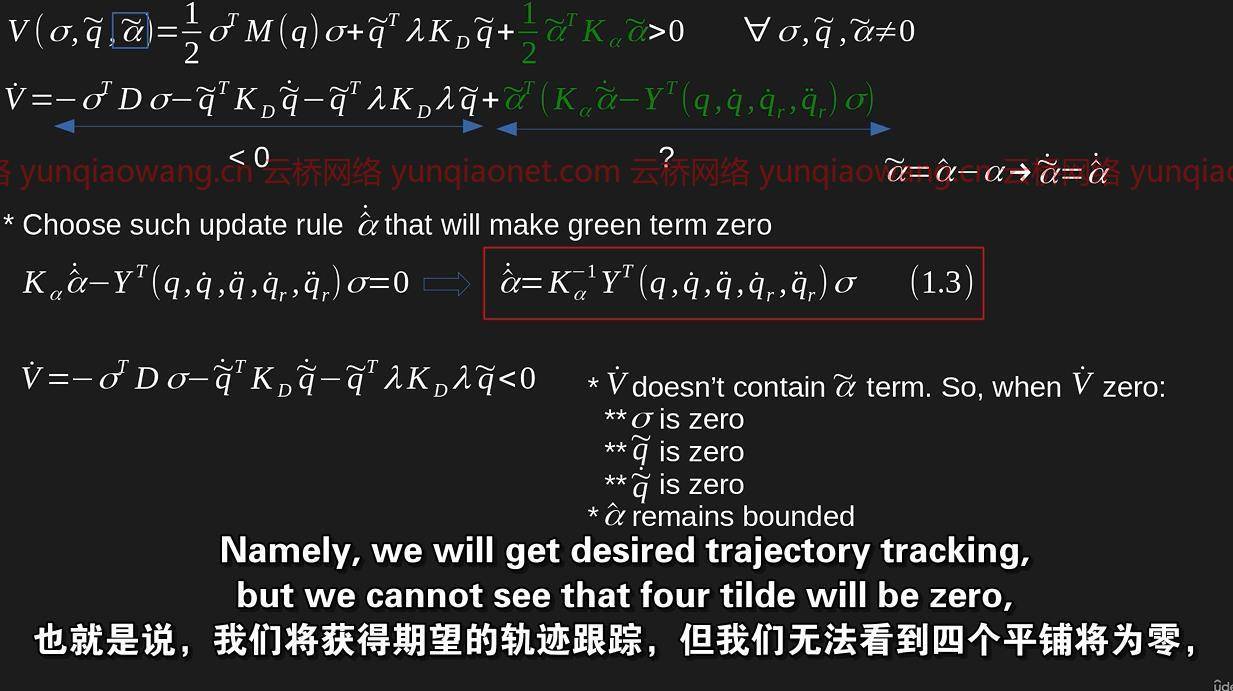
应用基本(局部放电+重力补偿、逆动力学)和高级(鲁棒和自适应)控制技术,以最小的跟踪误差执行所需的轨迹
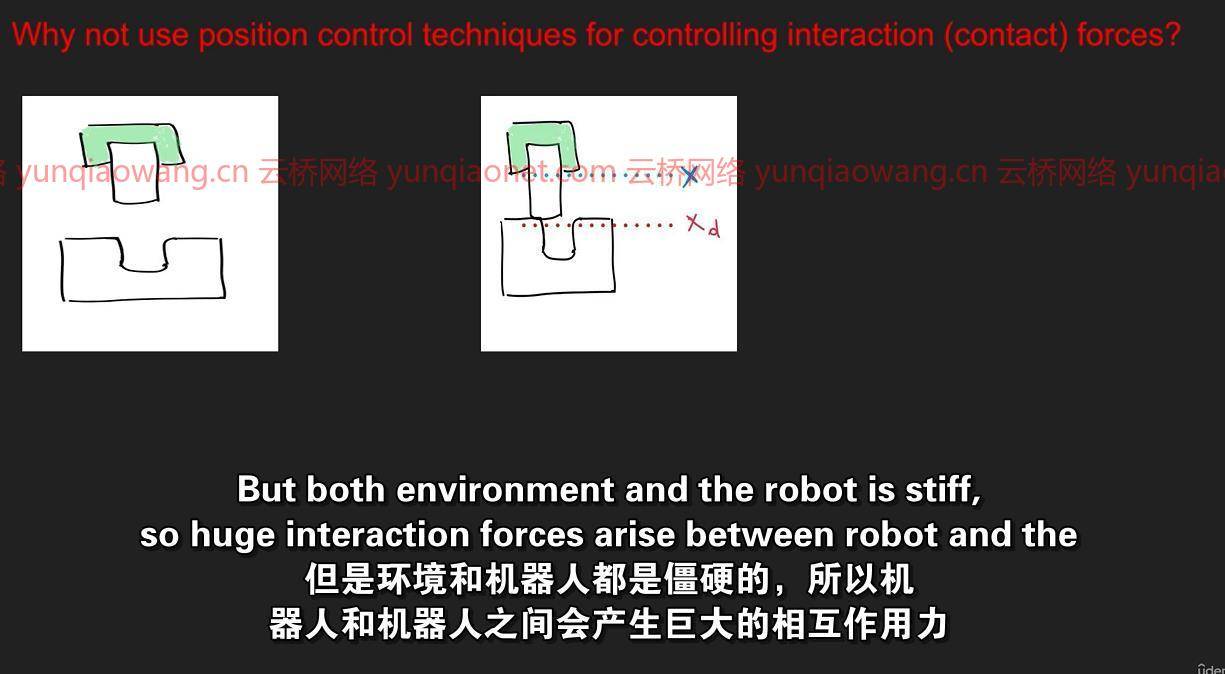
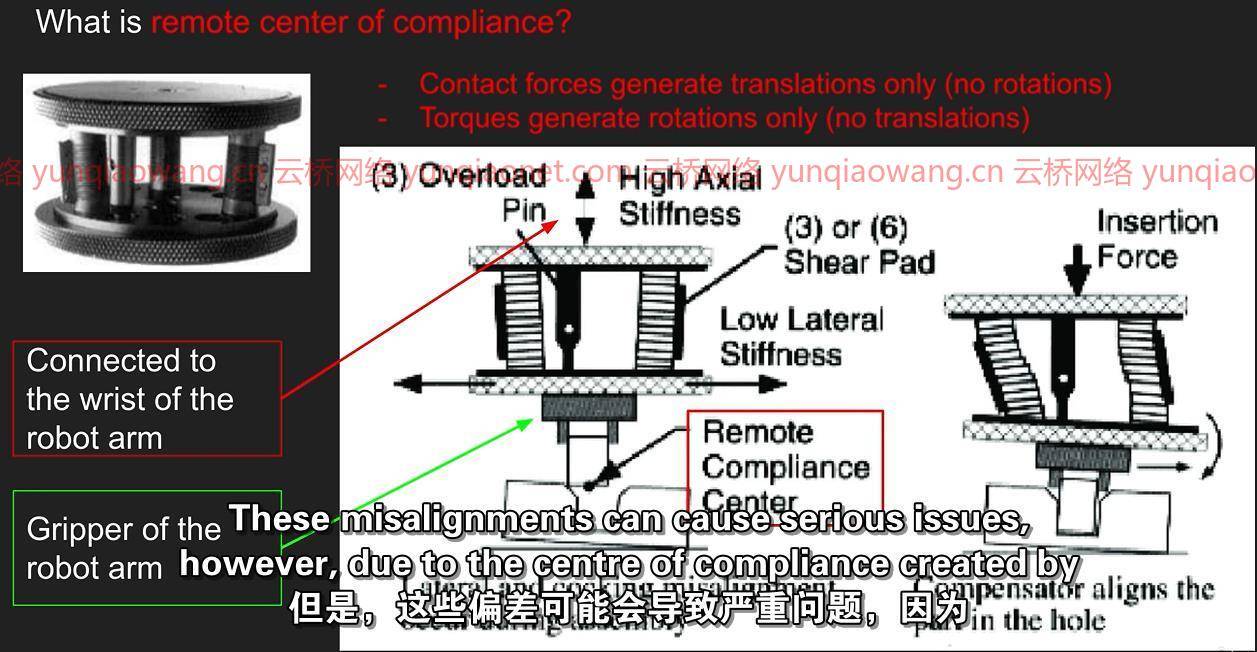
使用力(刚度/柔度、阻抗)和混合力/位置控制技术来控制机器人与环境接触时的行为
本课程是在假设具有线性代数、控制理论和三维动力学基础知识的基础上设计的。由于机器人是一个如此庞大的概念,不可能将所有这些东西都包含在一门课程中。不过,不用担心。在课程开始时,将向您提供“资源”文件,该文件将帮助您确定您缺少哪些信息,并将指导您找到正确的来源(免费课程和书籍),以便您可以学习它们。
所以,如果你真的想从专业上开始学习机器人,那就加入课程,现在就开始追随你的热情吧!
这门课是给谁的
任何想以学术方式开始机器人技术的人

MP4 | Video: h264, 1280×720 | Audio: AAC, 44.1 KHz, 2 Ch
Genre: eLearning | Language: English + srt | Duration: 58 lectures (14h 5m) | Size: 5.42 GB
Learn the fundamentals of robotics over robotic manipulators and how to apply theory into real world situations
What you’ll learn:
Understand the fundamentals of robotics
Apply the theoretical concepts into real tasks
Identify the problems needed to be solved in a given robotic task
Develop solutions based on the learned concepts for the identified problems
Requirements
Basic knowledge in linear algebra, control theory and 3D dynamics is required
Basic Matlab skills required to follow the coding sessions
Description
You are passionate about robotics and don’t know where to start? Don’t waste your time by asking questions like “Where to start in robotics?”, “Which book to read for robotics?”. The best way to start robotics is learning the necessary fundamental concepts with the correct sequence, as every next concept is related to the previous one. The purpose of this course is to introduce you to the most important basic concepts in robotics in a correct sequence, so you can easily relate and understand the logic behind each concept.
This course has been designed to provide the theory without going into unnecessary details. It is impossible to avoid theory and derivations in robotics because they will help you to understand the logic behind robotic concepts, so you can deal with different kinds of real-world robotic problems. However, opposite to the books, this course also provides coding and simulation sessions in order to supplement theoretical knowledge with practical ones. Obtaining theoretical and practical skills together will help you to identify the problem and apply appropriate solutions to solve it.
In this course you will learn:
3D rigid body dynamics which includes different kind of representations of rotations, rotation and homogeneous transformation matrices
Forward kinematics using DH convention
Velocity kinematics, geometrical and analytical Jacobians, robot manipulator singularities and inverse kinematics
Robot manipulator dynamic modeling using Euler-Lagrange method
Trajectory generation for robotic manipulators (polynomial and trapezoidal trajectories) alongside kinematic and dynamic scaling of trajectories
Application of basic (PD+gravity compensation, Inverse Dynamics) and advanced (robust and adaptive) control techniques in order to execute desired trajectories with minimal tracking error
Controlling the behavior of robotic manipulators while they are in contact with the environment using force (stiffness/compliance, impedance) and hybrid force/position control techniques
This course has been designed based on the assumption of having basic knowledge in linear algebra, control theory and 3D dynamics. As robotics is such a huge concept, it is impossible to include all these things in one course. However, don’t worry. At the beginning of the course, you will be provided with the ‘Resources’ file which will help you to determine which information you lack and will direct you to the correct sources (free courses and books) so, you can learn them.
So, if you really want to get started with robotics professionally, then join the course and start to follow your passion right now!
Who this course is for
Anyone who wants to start the robotics in an academic way
云桥网络 为三维动画制作,游戏开发员、影视特效师等CG艺术家提供视频教程素材资源!
1、登录后,打赏30元成为VIP会员,全站资源免费获取!
2、资源默认为百度网盘链接,请用浏览器打开输入提取码不要有多余空格,如无法获取 请联系微信 yunqiaonet 补发。
3、分卷压缩包资源 需全部下载后解压第一个压缩包即可,下载过程不要强制中断 建议用winrar解压或360解压缩软件解压!
4、云桥网络平台所发布资源仅供用户自学自用,用户需以学习为目的,按需下载,严禁批量采集搬运共享资源等行为,望知悉!!!
5、云桥网络-CG数字艺术学习与资源分享平台,感谢您的关注与支持!
